本博文是基于这个ROS软件包(https://github.com/hrnr/m-explore)的学习笔记 目录 multi robot exploration nav_msgs/OccupancyGrid map_msgs/OccupancyGridUpdate move_base multirobot_map_merge 参考资料 ...
”ros 学习 学习笔记 机器人 环境“ 的搜索结果
当然过程可能有点小插曲,这里也记录...ROS仿真机器人(安装、配置、测试、建图、定位、路径规划)提示:以下是本篇文章正文内容,下面案例可供参考后面继续学习,不过我是在笔记本的虚拟机中运行的,确实会卡性能。
基于ros的多机器人仿真(导航+编队)包含urdf文件,详细请参考项目笔记(包含导航、编队原理介绍,详细配置过程): 1、《如何在Gazebo中实现多机器人仿真》 : https://www.guyuehome.com/4889 2、《基于ROS的多...
正确安装Ubuntu与ROS Install Ubuntu请参考:http://blog.csdn.net/wyx100/article/details/51582617 Install ROS on your machine请参考:https://wiki.ros.org/ Step1: Create your ROS workspace 参考...
写在前面:笔者最近在做一个基于ROS平台的小项目,也算是从零开始学ROS,在这里写下一些学习时的笔记。 笔者学习参考:古月居 一、ROS环境安装 ROS历经多个版本的升级,目前正不断适用于机器人领域的研究与控制,ROS...
之前博客《ROS学习笔记之——机器人航向角的求解》介绍了怎么求机器人的航向角,但是该求法均为相对于初始点的求法。若一开始机器人的初始姿态角未知,则需要采用相应的传感器来计算初始姿态角 基本概念 传感器...

AHRS算法是自动航向基准系统(Automatic Heading Reference System)的简称, IMU是惯性测量装置(Inertial Measurement Unit)的简称,通常包含陀螺仪和加速度计。陀螺仪测量的是角速度,即物体转动的速度,把...
在前文《初识ROS笔记》中我对“ROS是什么”这一问题进行了初步的解释,《ROS机器人开发实践》一书对这一问题进行了系统且形象的阐释。起源:硬件技术的飞速发展在促进机器人领域快速发展和复杂化的同时也给机器人...
移动机器人
另外,机器人建模和仿真还可以帮助工程师实现快速迭代和开发,因为在虚拟环境中进行测试和验证比在实际机器人上进行测试和验证更加高效和灵活。通过使用ROS进行机器人建模和仿真,可以更快速地识别和解决机器人系统...
这是我接触的第一本ROS书籍,现将自己学习到的内容做个摘录,以方便后续的学习和总结。 对本书的印象:这是一本讲述ROS原理的书,同时也讲述了ROS与各类智能机器人结合的开发实现,没有太多程序的讲解,而重在架构...



RVIZ中显示双足机器人行走
真棒机器人机器人学习笔记这是我在NJUST的4年计算机科学学士学位和CMU的2年机器人学硕士研究的总结。 我这样做是为了回顾我所学到的知识并填补空白。 最重要的是,帮助对机器人技术感兴趣的年轻工程师快速学习机器人...

测试文件是test.txt,666的意思是改为可读可写的文件。2.修改文件只读属性。
之前博客《ROS学习笔记之——激光雷达SLAM建图》已经介绍过如何通过激光雷达SLAM建图了,本博文讲一下ROS机器人的导航相关 导航相关理论介绍 导航概述 机器人的位置是根据从编码器和惯性传感器(IMU传感器)...



【学习笔记】ROS-移动机器人导航相关一、定位二、导航三、可视化1. Rviz显示机器人运动轨迹方法: 一、定位 二、导航 三、可视化 1. Rviz显示机器人运动轨迹方法: 利用nav_msgs/Path消息实现 利用visualization_...
之所以能跳转ros环境的包,是因为我们项目文件夹下面的./vscode中settings.json中成功导入了ros环境的位置。在vscode中安装调试ros2所需要的插件,有Python、Pylance、C/C++、CMake Tools、ROS。首先,成功安装ros2...
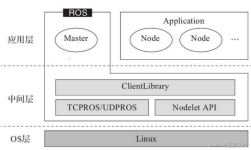
2章 1.节点:一些执行运算任务的进程 2.话题通信因为其异步性,消息具有开始位和结束位,不同于同步通信对发送和接受不要求在同一时钟下,则传输具有延时性(实时性弱、无反馈机制、有缓冲区)、可以多对...3.ros ma
因为现在市面上没有ros2学习的书籍,而且过了半年了还没有出现,所以干脆自己总结好了。我打算自己写一个笔记 ----公元2023年9月。
推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地